
论文“Heuristic Scheduling for Robotic Job Shops Using Petri Nets and Artificial Potential Fields”探讨了制造业中自动引导车辆(AGV)和任务分配的联合调度优化问题,以减少作业的完工时间为优化目标,提出了一种基于人工势场和Petri网的调度方法。
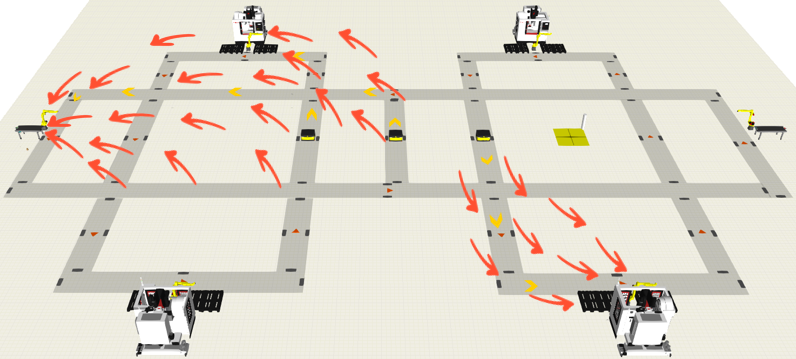
首先利用库所赋时Petri网对一个实际规模的机器人作业车间进行建模,模型包含一个路径子网和多个任务子网。该机器人作业车间调度问题被转换为寻找使完工时间最小的变迁激发序列的问题,并采用A*算法进行求解。
其次,针对任务排序问题,提出了一种基于Petri网拓扑结构的任务网势场设计方法,定义了任务子网中库所的势能参数,设计了最大势差启发函数,并证明了,该启发函数是可采纳的,保证了A*算法能够生成最优解。实验结果表明,最大势差启发函数可以有效提高A*算法的调度效率,特别在本文设定的场景下优于其他启发函数,但在任务和AGV数量增多时其效率下降明显。
最后,为了优化AGV路径规划,提出了基于任务网势场和路径网势场的总体势差启发函数。实验表明,总体势差启发函数在处理大规模任务和多AGV的情况下更具适应性,能够在合理的时间内找到最优或近似最优的调度方案。相比最大势差启发函数提升了一到两个数量级的搜索效率,特别是在需要处理数百个零件的大规模任务中,相较于遗传算法能够找到更有的调度策略,有效减少完工时间。
公众号
访问量: 开通时间:-- 最后更新时间:--
泉州校区地址:福建省泉州市丰泽区城华北路269号 邮编:362021
厦门校区地址:福建省厦门市集美区集美大道668号 邮编:361021

