平行Petri网与智能决策
通用链接
华侨大学官网
English
手机版
首页
研究团队
科研团队
学生团队
科学研究
研究方向
论文成果
科研项目
专利成果
课题组新闻
当前位置:
中文主页
-
成果展示
成果展示
平行Petri网
发布时间:2024-09-26 点击次数:
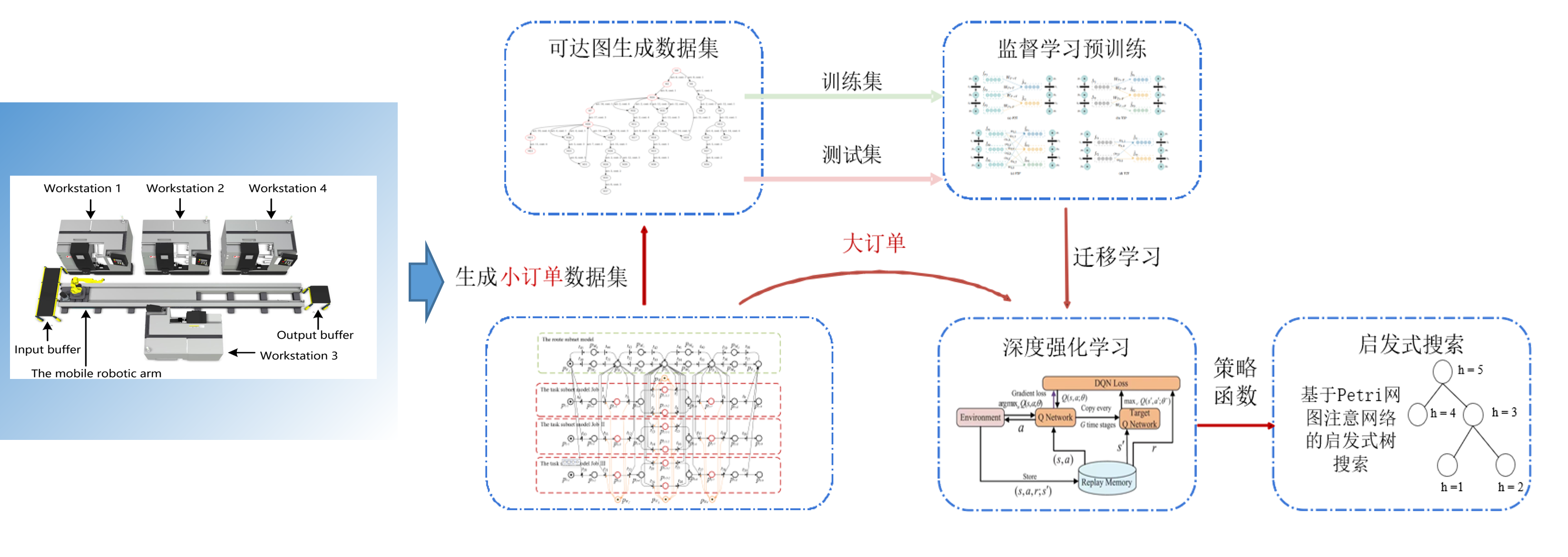
面对实际生产环境中随时可能出现的变化,直接求解出完整动作序列的静态调度方法需要较长时间的重调度。基于深度强化学习(DRL)的启发式设计方法通过构建一个可学习的启发式函数,能快速响应变化。
团队提出了一种基于图注意力网络和DRL的库所赋时Petri网迁移学习调度策略方法,通过可达图数据集生成算法对图注意网络进行小订单加工任务进行预训练,能够有效提升DRL前期探索效率,在变化的实际生产环境中及时得到有效的调度策略启发式函数。
上一条:
机器人搬运任务规划
下一条:
平行Petri网与芯片制造