
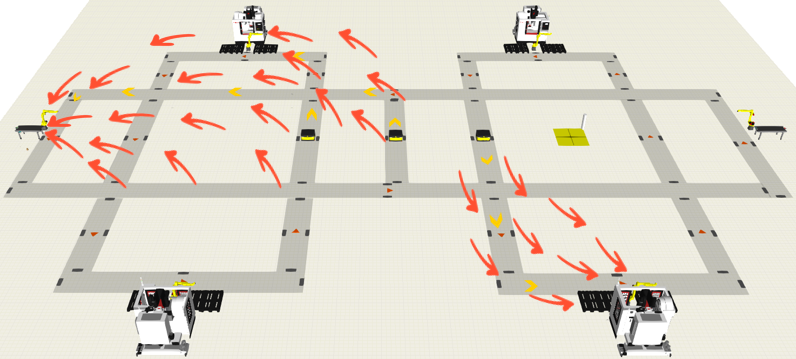
机器人车间调度是通过加入AGV路径规划扩展的复杂组合优化问题,图搜索方法常用于寻找最优调度,A*算法提供了基础框架。本研究引入了人工势场方法,引导Petri网中的托肯自发移动,快速达到目标状态。团队采用赋时Petri网对机器人作业车间建模,包含路径和任务子网。随后,基于Petri网拓扑结构设计任务网势场,并提出最大势差启发函数,证明其可采纳性。为优化AGV路径规划,进一步设计了路径网势场,构建总体势差启发函数。
经过验证,最大势差启发函数提高了A*算法效率,但在任务和AGV数量增多时性能下降。总体势差启发函数在处理大规模任务时更具优势,搜索效率提升了一到两个数量级,特别是在处理数百个零件时,相较于遗传算法能显著减少完工时间并找到更优的调度方案。
公众号
访问量: 开通时间:-- 最后更新时间:--
泉州校区地址:福建省泉州市丰泽区城华北路269号 邮编:362021
厦门校区地址:福建省厦门市集美区集美大道668号 邮编:361021

