电机拖动课程设计任务书(2019)
&s题目:
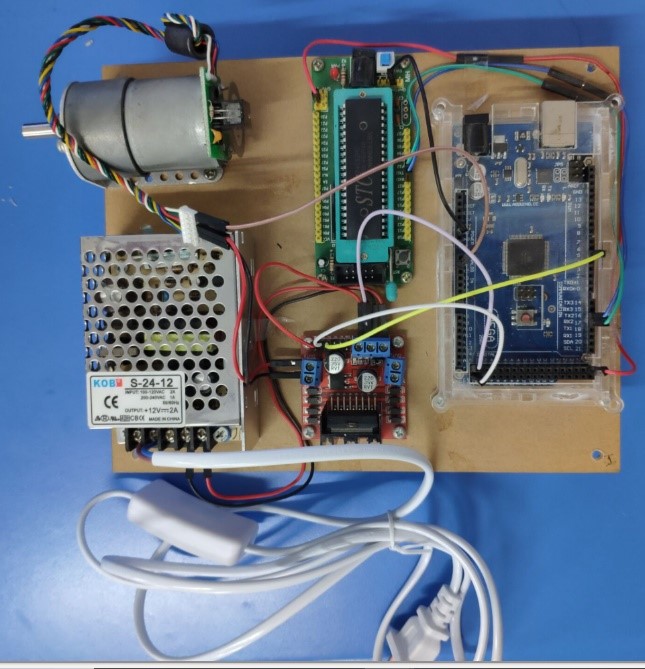
题目1:直流电机电机的双闭环控制:电流控制与速度控制;(学号尾数单)
题目2:步进电机的双闭环控制:速度控制与位置控制;(学号尾数双)
&s 基本硬件:
u 直流电机/步进电机,带编码器(每转100个脉冲以上),大概30;
u L298电机驱动/步进电机驱动,大概10;
u 单片机,STM32或Arduino,大概20;
u 电流传感器;大概10;(根据电机额定电流)
u 电池/电源;(可以寝室为单位买),大概20-30;(根据电机额定电压)
u 稳压模块;大概3-5;
u 电线等
&要求:
u 每人独立完成一套双闭环控制硬件实物。
u 单片机编程。
u Matlab上位机程序。通过matlab读取串口,获取电机控制量输入,转速输出,电流输出;
u 给出电机转速模型的传递函数。
u 给出控制器设计方法。例如:PID控制、输出反馈控制、状态反馈控制等;(有兴趣的同学,可以找我讨论先进控制方法,一起发表论文)
u 拓展功能:语音控制,灯光闪烁,超声波(距离-转速设定值),智能风扇,光敏传感器,温度传感器,音频传感器,双电机对拖(发电);风悬浮;风力车
& 实验报告。交报告:6月10日,机电实验楼,A233,学习委员收。
目录提纲:
u 电机模型分析与模型辨识;
u 双闭环电机拖动控制原理;
u 控制器设计与仿真;
u 实验系统搭建与实验分析;
u论文写好了,可以投《华侨大学学报》。
&验收、答辩(6月15日,上午8点30,机电实验楼,A233,录像留存);报告+实物+答辩;
& 注意:实物美观,布局合理,使用方便
& 做好了,淘宝上卖掉?


电机拖动课程设计任务书(2018)
(一种“电动指南车”:即超声波雷达)
&s整体要求:
1. 小车电机的速度控制;
2. 小车的直线运动,圆形轨迹运动;
3. 带超声波传感器的云台,小车运动(包括转弯)过程中,超声波传感器始终朝一个方向;
4. 其他功能;(完成1、2、3后,鼓励自由发挥,如各种控制算法、小车路径规划与物体跟踪;超声波锁定物体、蓝牙/WiFi连接手机控制等)
&s基本硬件:
底盘(淘宝,大概25元);光电测速传感器(智能小车测速模块);
L298电机驱动;
Arduino单片机;
超声波传感器云台;
电池;
稳压模块(电压稳到5v供电);
其他;
(不允许买成品,只能买带电机的小车底盘和相关元器件,自己组装和代码编写。)
超声波云台 超声波测距带转向 固定 180℃ 带9G舵机 超声波模块车
&s分组:
4人一组,分别负责电机调速控制、小车轨迹控制、超声波云台控制,整车共同完成;(自由组队,选带队组长1人,建议合理搭配,确保每个小组都有能动手的同学;鼓励小组间相互讨论和技术交流)
&s 报告撰写
第一章,小车整体设计;
第二章,小车电机调速控制、小车轨迹控制、超声波云台控制部分设计(组长写三个部分的综合;组员写1个部分;);
第三章,各自部分实验、数据分析;
第四章,结论;
&s交报告:11月25日,机电实验楼,A233,学习委员收。
&s 验收(12月2日,周日上午8点30,机电实验楼,A233,录像留存,根据比赛成绩加分)
1. 报告+实物+答辩;
2. 小车轨迹控制演示;(直线、圆)
3. 指南车演示;(小车能观围绕一个物体转一圈)
4. 其他功能展示;

